ロボット掃除機における超音波センサーの原理と応用
- シェア
- 出版社
- Zoe
- 発表時間
- 2024/8/17
概要
ロボット掃除機で超音波技術を使用してカーペットを識別する原理と応用は、反響音で床の材質を判断するA超音波診断に似ています。AIターゲット検出と比較して、超音波技術は照明や色などの条件に制限されません。

ロボット掃除機 4.0 には、床とカーペットの認識の問題を解決する新しいセンサーである超音波センサーが搭載されました。
超音波センサーとは何ですか?
超音波センサーは、超音波信号を他のエネルギー信号(通常は電気信号)に変換する装置です。超音波は、振動周波数が20kHz以上で、波長が人間の耳の可聴範囲(20Hz〜20kHz)を超える機械波です。超音波は、周波数が高く、波長が短く、回折が最小限で、指向性が特に優れており、光線のように方向性を持って伝播する能力を備えています。日常環境では、コヒーレント波を除いて干渉を受けにくく、人体に害を及ぼすことはありません。
医療、自動車、ドローン、その他の産業におけるその応用範囲は非常に広範囲です。
超音波センサーは自動車やドローンにも広く使われています。
たとえば、バックパーキングセンサーなどです。

ロボット掃除機に超音波センサーが必要なのはなぜですか?
実際、超音波センサーはロボット掃除機がカーペットを「識別」するのに役立ちます。超音波センサーを装備すると、ロボット掃除機は床の材質の種類を判断できます。
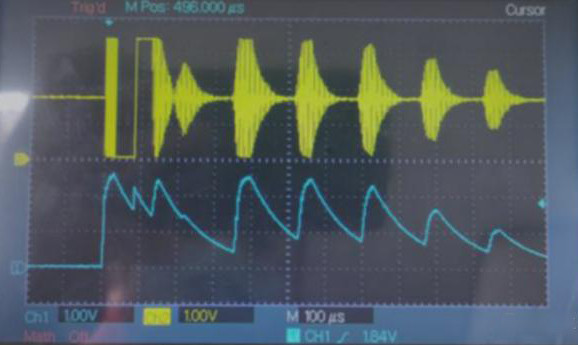
滑らかな床に遭遇すると、反射モードにより超音波は床によって最小限に吸収され、センサーは波の連続的な「跳ね返り」を検出します。
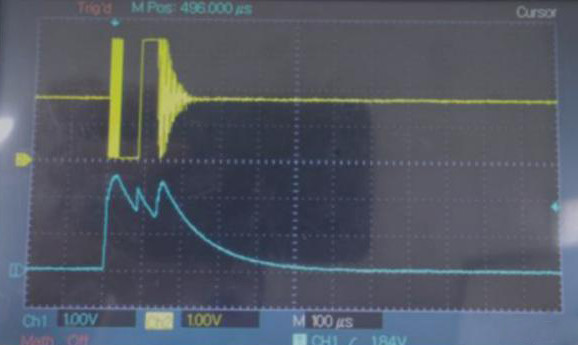
しかし、ロボットが繊維のあるカーペットに遭遇すると、非反射モードに基づいて、超音波はフェルト、ウール、綿、スポンジフォームなどの吸音特性の強い素材に吸収されます。この時点で、ロボット掃除機はエコーを受信せず、カーペットエリアに近づいていることを認識します。
最先端の AI 物体検出アルゴリズムではなく、超音波検出を選択する理由は何でしょうか?
AI による物体検出が「視覚」に依存しているのに対し、超音波センサーは「タッチ」検出のように機能します。
AI オブジェクト検出の実際の有効性は、照明、カーペットの色、検出角度、リアルタイム処理速度、カメラの解像度など、多くの要因によって異なります。
たとえば、照明が暗く、カーペットの色が濃い場合、AI はカーペットを床と誤認する可能性があります。ただし、超音波センサーの動作原理により、これらの要因の影響を受けないため、このような誤判断を回避できます。
推奨超音波センサー


検出範囲: 100〜2000 mm、200〜4000 mm、350〜6000 mm 材質: 銅ニッケルメッキ、プラスチック継手 接続タイプ: 5ピンM12コネクタ

検出範囲: 30〜300 mm、50〜500 mm、60〜1000 mm 材質: 銅ニッケルメッキ、プラスチック継手 接続タイプ: 5ピンM12コネクタ

検出範囲: 100〜2000 mm、150〜3000 mm 材質: プラスチックアクセサリ、エポキシ樹脂充填 接続タイプ: 5ピンM12コネクタ