レーザー距離センサーとレーザー変位センサーの違いは何ですか?
- シェア
- 出版社
- Zoe
- 発表時間
- 2024/8/31
概要
レーザー距離センサー vs 変位センサー:動作原理・応用分野・技術仕様の核心的差異を解説。最適な測定ソリューションの選び方!

光学計測センサーの台頭と発展の動向
製造、精密機器、バイオメディカル、航空宇宙などの分野では、測定の精度と効率に対する需要が着実に高まっています。非接触、デジタル、高精度、高感度の光測定センサー、特にレーザー距離センサーとレーザー変位センサーは、さまざまな業界でより正確で効率的、かつインテリジェントな測定ソリューションを提供しています。

レーザー距離測定技術の基礎と分類
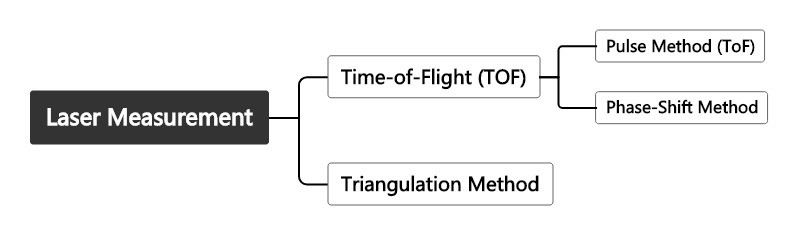
レーザー測定の基本原理に基づいて、その方法は飛行時間法(ToF)と三角測量法に分けられ、その中で飛行時間法はさらにパルス法(ToF)と位相シフト法に分類されます。
下の図の通りです。
パルス方式(ToF):長距離・大規模測定に最適な選択肢
原理:
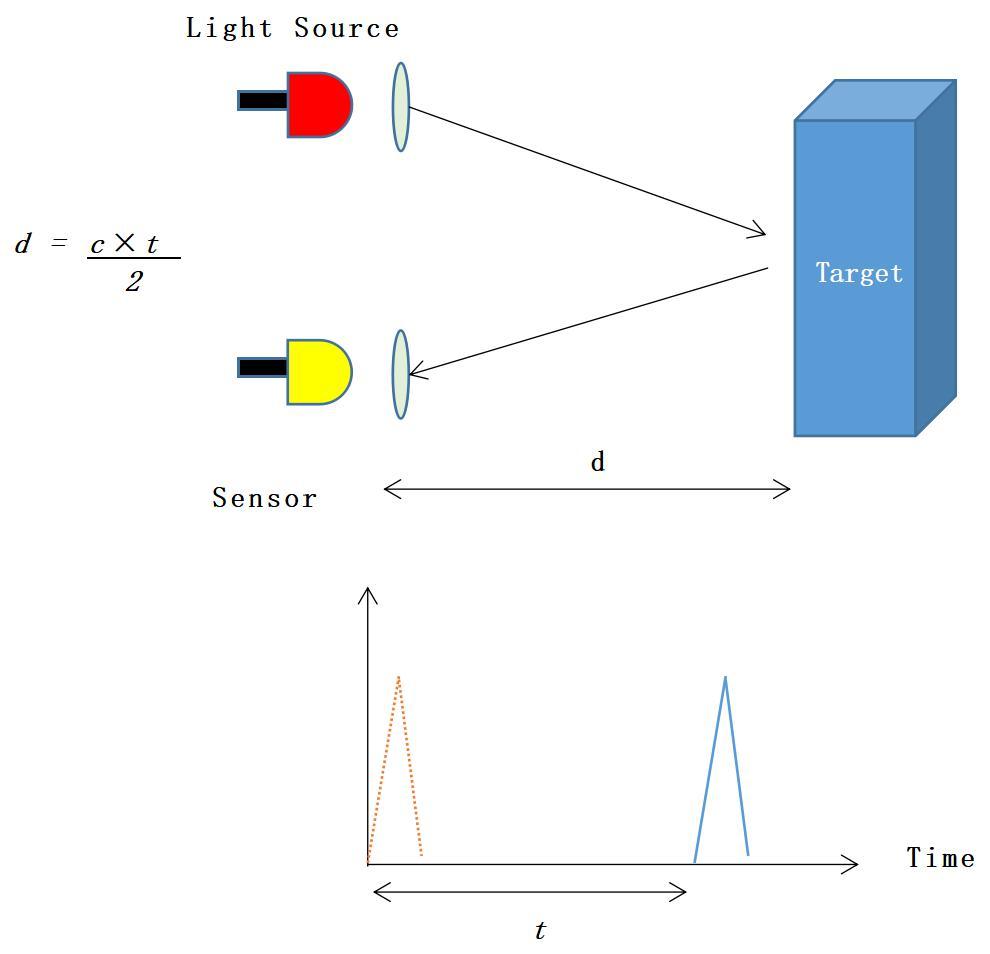
パルス方式 (ToF) は、レーザー パルスがエミッターからターゲットまで移動し、レシーバーに戻るまでの時間を測定するものです。レーザー パルスが放射され、ターゲットで反射し、放射と受信の間の時間差が記録されます。光速𝑐と時間差𝑡 を使用すると、ターゲットまでの距離𝑑 は次の式で計算できます。
ここで、 𝑑はターゲットまでの距離、 𝑐は光速 (3 × 10^8 m/s)、 𝑡は往復時間です。2 で割るのは、測定の往復の性質を考慮しているためです。
注:真空中の光の速度は一般に c で表され、299,792,458 メートル/秒 (約 300,000 キロメートル/秒、186,000 マイル/秒、6 億 7,100 万マイル/時) と正確に等しい普遍的な物理定数です。
パルス方式 (ToF) は、ドローン マッピング、3D マップ構築、環境モニタリング (大気中の汚染物質の垂直分布など)、自律走行車の障害物検出と回避など、長距離または広い領域の測定を必要とするアプリケーションに特に適しています。
LiDAR (レーザー検出および測距): 自動運転、ロボットナビゲーション、地形マッピング、建物の 3D モデリングなどの分野では、LiDAR システムはパルス方式 (ToF) を利用して高精度の 3D 空間情報を取得し、意思決定に重要なデータサポートを提供します。
航空宇宙: パルス方式 (ToF) は、宇宙船と地上または対象物体との間の正確な距離測定にも使用され、着陸船のナビゲーションや火星探査機の探査などのミッションの安全な実行を保証します。
位相シフト方式:中・近距離の高精度測定を実現する信頼性の高い技術
原理:
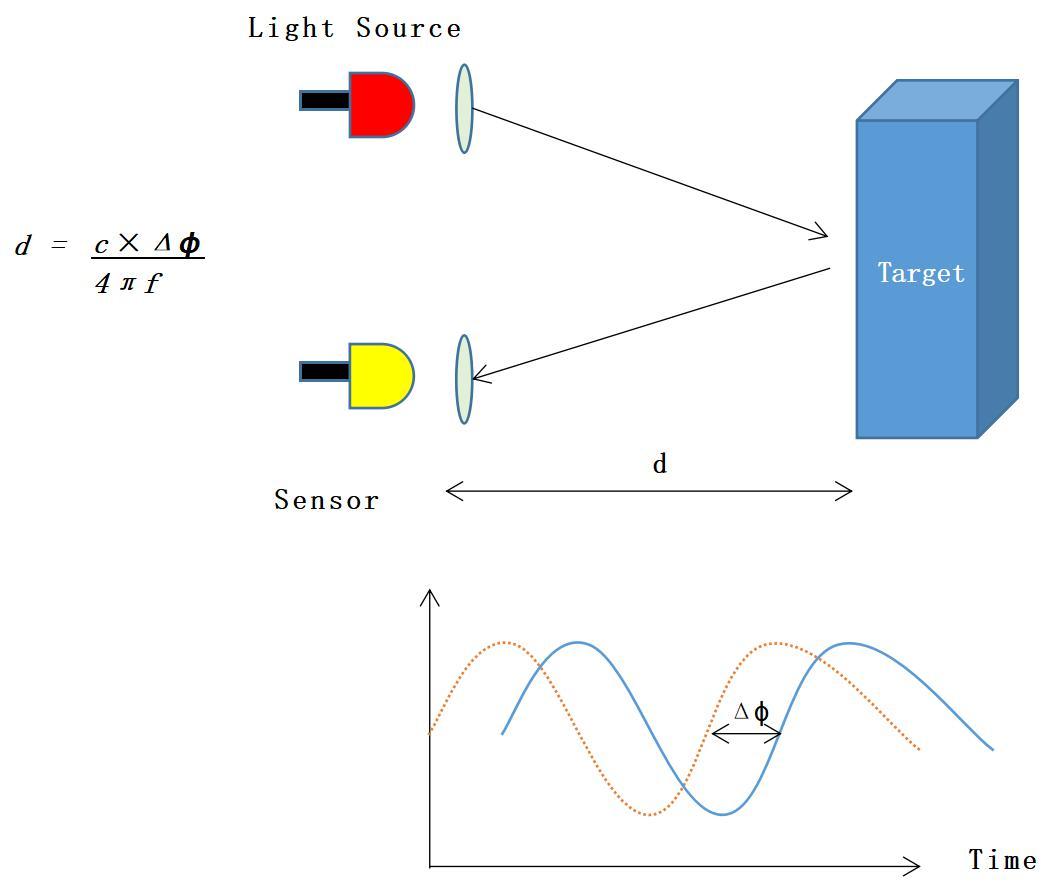
位相シフト法では、レーザービームを変調し、送信信号と受信信号間の位相差を測定して距離を計算します。レーザービームは正弦波として変調され、送信波と反射波間の位相シフトΔ 𝜙 が測定されます。この位相シフトはターゲットまでの距離に直接関係しており、距離𝑑 は次の式を使用して計算できます。
ここで、 𝑑はターゲットまでの距離、 𝑐は光速 (3 ×10^8 m/s)、 Δ𝜙は位相シフト、 𝑓 は変調周波数です。
位相シフト方式は、中距離および短距離でパルス方式 (ToF) よりも高い測定精度を提供するため、産業オートメーションに欠かせないツールとなっています。たとえば、位相シフト レーザー センサーは、ロボット アームの正確な位置決め、自動組み立てラインでの部品の位置合わせ、CNC マシンでの精密加工において重要な役割を果たします。
品質検査: 製造業では、位相シフト レーザー センサーを使用して、製品の表面の平坦性、厚さ、および小さな寸法の変化を測定し、品質管理とプロセス監視を支援します。
科学研究: 物理学や材料科学などの分野では、位相シフト法は、薄膜の厚さの測定や表面粗さの分析など、材料の微視的構造や特性を研究するために使用されます。
三角測量法:超短距離測定のための精密ツール
原理:
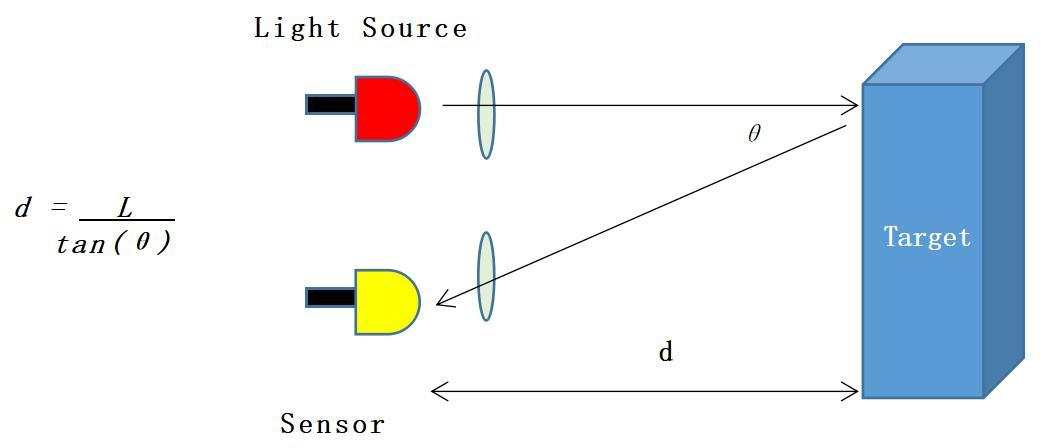
三角測量法は幾何学的三角測量法に基づいており、レーザーのエミッターとレシーバーの既知の位置と反射されたレーザービームが三角形を形成します。レーザービームはターゲットに向かって放射され、レシーバーに反射されます。放射されたビームと反射されたビームの角度差𝜃 を測定し、エミッターとレシーバー間の既知のベースライン距離𝐿 を使用することで、ターゲットまでの距離𝑑を次の式で計算できます。
ここで、 𝐿は送信機と受信機間の既知の基線距離、 𝜃 は反射ビームの角度です。
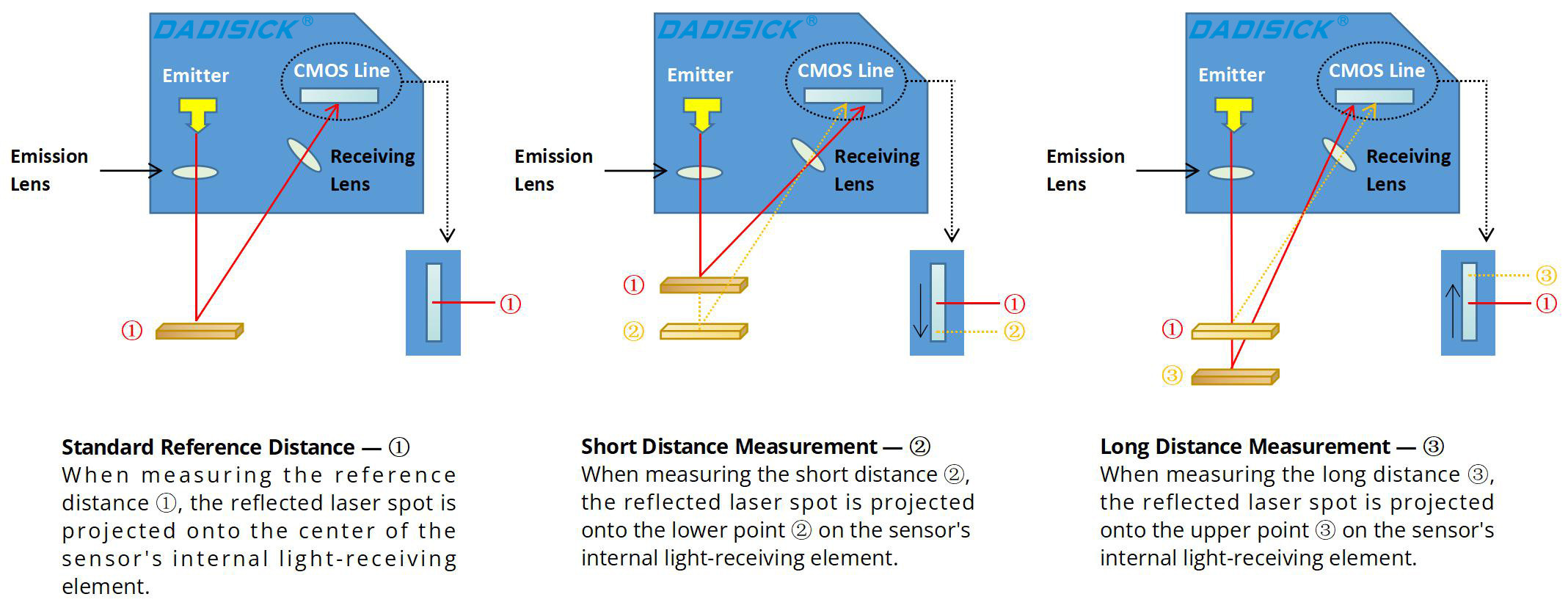
三角測量は、三角形の関係に基づいた幾何学的な測定方法です。この方法では、測定対象物にレーザースポットを投影し、対象物からの反射光を一定の角度で CMOS センサー素子に向けます。CMOS ライン上の光点の位置は、対象物までの距離に応じて変化します。このようにして、非常に小さな距離でも、対象物までの距離を正確に測定できます。
超短距離高精度測定:三角測量法は、測定精度と安定性が極めて高いことで知られており、電子部品加工、半導体製造、精密加工などの分野で広く使用されています。チップ上の線幅や部品の寸法公差など、小さな寸法変化を正確に測定できます。
自動車製造:自動車製造工程では、車体溶接時の精密な位置合わせ、塗装前の表面品質検査、部品の組み立て精度管理に三角測量レーザーセンサーが使用されています。
ロボット工学と自動化: ロボット視覚システムでは、三角測量原理に基づくレーザー センサーが 3D 再構築、姿勢推定、経路計画に使用され、ロボットの知能が向上します。
太陽光発電: 太陽光発電業界では、三角測量レーザーセンサーを使用して、太陽光発電パネルの表面の平坦性、ひび割れ、汚れを検出し、製品の品質と発電効率を確保しています。
レーザー変位センサ:高精度測定
レーザー変位センサーは、通常、三角測量法を使用します。この測定方法は、ナノメートルレベルの精度を実現できるため、高精度の短距離測定に適しています。現在の産業用ロボットアプリケーションでは、三角測量は一般的に使用されている技術の 1 つであり、直線性は最大 1 ミクロン、解像度は最大 0.1 ミクロンです。レーザー変位センサーは、物体の変位、平坦度、厚さ、振動、距離、直径などの幾何学的量を検出するためによく使用されます。これらのセンサーは、工業製造、精密加工、品質管理において重要な役割を果たします。

測定範囲: 24 mm~400 mm
解像度: 最小 2 μm、最大 75 μm
保護等級: IP64
サポートされているインターフェース: RS485 / スイッチ出力 / アナログ電流および電圧

測定範囲: 25 mm~600 mm
繰り返し精度: 最小 10 μm、最大 800 μm
保護等級: IP60
サポートされているインターフェース: RS485 / スイッチ出力 / アナログ電流および電圧
レーザー距離センサー:産業オートメーションにおける広範な応用
レーザー距離センサーは、通常、パルス方式(ToF)または位相シフト方式を採用しており、より広範囲の距離測定ニーズに適しているため、産業生産自動化で広く使用されています。これらのセンサーは、長距離測定の要件を満たすだけでなく、高精度と高速応答時間も備えています。産業自動化の分野では、レーザー距離センサーは、位置制御とナビゲーション、輪郭測定と表面検査、安全保護、物流と倉庫管理、自動溶接と切断に広く使用されています。自動化システムに信頼性の高い距離測定データを提供し、生産効率、精度、安全性の向上に役立ちます。また、インテリジェント輸送や自動運転などの新興分野でも独自の利点を発揮します。

測定範囲: 0.1 m ~ 50 m
距離測定原理: 位相シフト法
解像度: 1 mm
保護等級: IP67
サポートされているインターフェース: RS485 / スイッチ出力 / アナログ電流および電圧

測定範囲: 0.2 m ~ 100 m
距離測定原理: 位相シフト法
解像度: 1 mm
保護等級: IP67
サポートされているインターフェース: RS232 / RS485 / スイッチ出力 / アナログ電流および電圧