インダストリー4.0フレームワークにおけるインテリジェントな人間とロボットのコラボレーションのための安全ソリューション
- シェア
- 出版社
- Zoe
- 発表時間
- 2024/9/18
概要
自動化されたロボット操作のプロセスでは、安全保護が非常に重要です。一般的な安全装置には、安全柵、安全ドアスイッチ、安全ライトカーテン、安全レーザースキャナー、安全マットなどがあります。この記事では、自動化されたロボット作業領域での安全ライトカーテンと安全レーザースキャナーの適用、およびインダストリー4.0の枠組みにおける人間とロボットの協働環境における安全保護ソリューションに焦点を当てます。
自動化ロボット作業エリアの安全保護ソリューション
自動化されたロボット操作のプロセスでは、安全保護が非常に重要です。一般的な安全装置には、安全柵、安全ドアスイッチ、安全ライトカーテン、安全レーザースキャナー、安全マットなどがあります。この記事では、自動化されたロボット作業領域での安全ライトカーテンと安全レーザースキャナーの適用、およびインダストリー4.0の枠組みにおける人間とロボットの協働環境における安全保護ソリューションに焦点を当てます。
インダストリー4.0フレームワークにおけるインテリジェントな人間とロボットのコラボレーションのための安全ソリューション
インダストリー4.0の発展に伴い、ロボットは人間に代わって反復的な作業を実行し、生産効率を向上させるためにますます使用されています。しかし、産業用ロボットは動きが速く、かなりの力を発揮するため、人が誤って作業エリアに近づくと重大な事故が発生する可能性があります。そのため、ロボットとその作業環境の厳格な安全監視、特にロボットの力、速度、移動軌道のリアルタイム監視と制御が不可欠です。
EU機械指令やISO 13849-1などの国際規格によれば、稼働中のすべての機械には必要な安全保護装置を装備する必要があります。国や地域によっては、安全に対する責任は機器のユーザーが負うため、企業は安全な作業環境を提供し、ロボットの操作中に従業員が危害を受けないようにする必要があります。
従来の産業用ロボットは、通常、固定された位置に設置されており、かさばり、移動が困難です。しかし、技術の進歩により、軽量で柔軟性があり、移動しやすい新世代のロボットが徐々に市場の主流になりつつあります。これらの協働ロボットは、さまざまな作業領域に簡単に移動できるため、より柔軟で安全な保護ソリューションに対する需要が生まれています。
インダストリー 4.0 の人間とロボットの協働環境では、ロボットはタスクを正確に実行する必要があるだけでなく、より厳しい安全基準を満たす必要があります。ロボットの力、速度、移動軌道を常に監視し、実際のリスクに基づいて制限を適用する必要があります。リスク評価は非常に重要です。リスク評価の結果によって、安全ライトカーテンや安全レーザースキャナーの使用など、人間と機械の安全な距離を確保して作業員の安全を守るための適切なリスク低減対策が決まるからです。
セーフティライトカーテンの動作原理
セーフティ ライト カーテンは、保護対象領域全体に平行光線を一列に放射することで保護を提供します。人または物体が光線を遮ると、受信ユニットは直ちに機械の制御システムに信号を送信し、機器の動作を停止させます。セーフティ ライト カーテンの利点は、構造がシンプルで応答が速いことであり、機械動作中の緊急停止シナリオに最適です。
安全レーザースキャナの動作原理
安全ライトカーテンとは対照的に、安全レーザー スキャナーは距離設定によって保護を実現します。安全レーザー スキャナーは飛行時間 (TOF) 測定原理に基づいて動作し、赤外線レーザー パルスを放射して検出ゾーンを作成します。物体が検出されると、レーザー パルスは物体の表面からスキャナーに反射され、スキャナーは放射と受信の時間差に基づいて物体までの距離を計算します。
具体的な運用プロセス
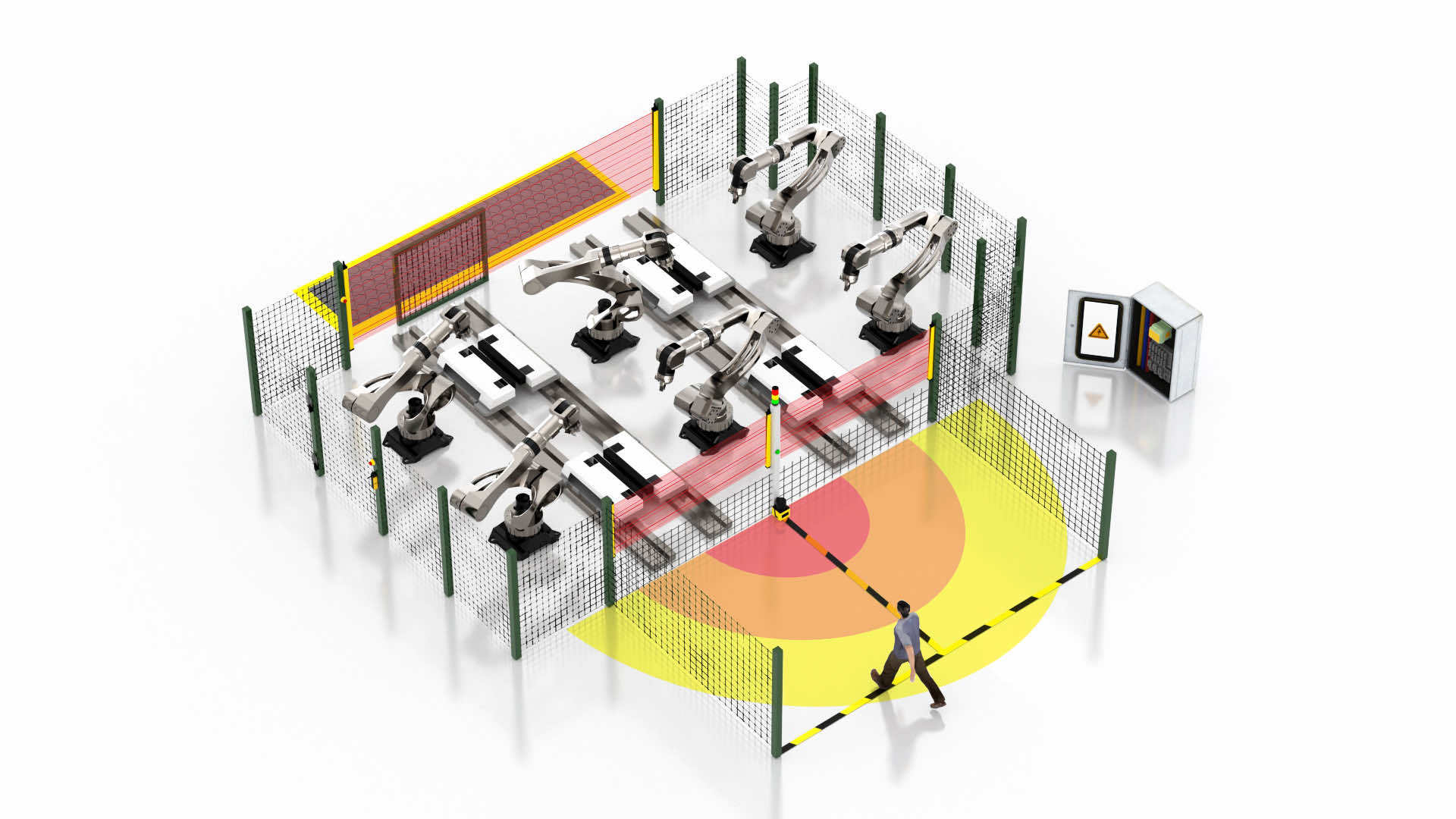
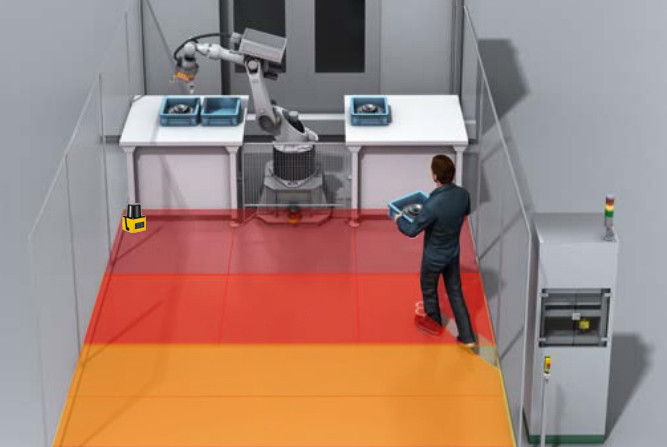
DADISICK の安全レーザースキャナーを例にとると、ユーザーはコラボレーションゾーンや警告ゾーンなどの検出ゾーンをカスタマイズできます。自動化された操作では、作業員がロボットの作業エリア (コラボレーションゾーン) に入ってオブジェクトを配置する必要がある場合、システムは信号灯の色で現在のゾーンの状態を示します。黄色のライトは、オペレーターがコラボレーションゾーンに入ったことを示し、ロボットは減速します。オペレーターが警告ゾーンに入ると、赤いライトが点灯し、音と視覚的なアラームが鳴り、オペレーターが危険エリアに入ったことを示します。ロボットは完全に停止します。オペレーターが保護ゾーンを離れると、システムとロボットは手動操作なしで自動的に操作を再開し、操作プロセスの利便性と安全性を確保します。
安全装置と機械制御システムの主要コンポーネント
出力信号スイッチング デバイス (OSSD) は、産業オートメーションの安全性の分野で広く使用されている重要なコンポーネントであり、主に安全装置と機械制御システム間の効果的な接続と信号伝送を確立するように設計されています。
動作原理
OSSD は通常、センサー (ライトカーテン センサーやレーザー スキャナーなど) と組み合わせて使用され、センサーの状態を監視し、物体や人が危険領域に侵入したかどうかを判断します。
センサーが侵入を検出すると、OSSD に信号を送信し、OSSD はこの信号を機械制御システムが認識できる形式に変換して制御システムに転送します。
制御システムは、OSSD 信号を受信すると、緊急停止や速度低下など、事前に設定された安全ロジックに従って適切な安全対策を実行します。
アプリケーションシナリオ
OSSD は、ロボット作業エリア、スタンピング マシン生産ライン、自動組立ラインなど、特に人員の安全保護が必要なシナリオにおいて、さまざまな産業オートメーション機器や生産ラインに広く適用されています。
このようなシナリオでは、OSSD は安全ライトカーテン、安全ドアスイッチ、安全マットなどの安全装置と連携して動作し、事故のリスクを効果的に低減する完全な安全保護システムを形成します。
2D TOF 障害物回避安全レーザースキャナー

技術データ | ||||
動作原理 | 飛行時間(TOF)測定原理 | |||
IO出力 | NPN または PNP | |||
作業エリア | 0.05m~5m | 0.05m~20m | ||
レーザー光源 | 905 nm(クラスI) | |||
絞り角 | 270° | |||
スキャン周波数 | 15Hz / 30Hz | |||
角度分解能 | 0.1° / 0.3° | |||
自己学習機能 | 環境を自動的にスキャンしてエリアを生成する | |||
電気接続 | Db15 男性 / 散布図 | |||
供給電圧 | DC9V~28V | |||
消費電力 | 2ワット | |||
スイッチドライブ | DC 30 V 50 mA 最大。 | |||
シェルの色 | 黄色 | |||
エンクロージャ定格 | IP65 | |||
重さ | 150 g(ケーブル含まず) | |||
寸法(長さ×幅×高さ) | 50 × 50 × 76ミリ | |||
検出可能な物体の形状 | ほぼあらゆる形状 | |||
測定誤差 | ±30mm | |||
フィールドセットの数 | 16 フィールド、3 つの同時保護フィールド (フィールド セットあたり) | |||
接続タイプ | マイクロUSB | |||
入力 | GND/NC × 4 | |||
スイッチ出力 | NPN × 3、デバイス動作状態; PNP × 3、デバイス動作状態 | |||
遅延時間 | 100 ms ~ 10,000 ms (設定可能)、標準値 330 ms | |||
応答時間 | 15 Hz: 67 ms ~ 29,949 ms (設定可能)、標準値 134 ms; 30 Hz: 33 ms ~ 29,997 ms (設定可能)、標準値 66 ms | |||
ステータスインジケーター | ステータスインジケーター×1、エリアグループインジケーター×3 | |||
耐振動性 | 10 - 55 Hz、振幅 0.75 mm、XYZ 3 軸、軸あたり 2 時間。 50 - 200 Hz、196 m/s² (20G)、スキャン速度 2 分/サイクル、XYZ 3 軸、軸あたり 2 時間。 | |||
周囲動作温度 | -10℃~+55℃ | |||
保管温度 | -30℃~+75℃ | |||
周囲光耐性 | >15,000ルクス | |||