超音波レーダー衝突回避センサーを搭載したAGV移動ロボット
- シェア
- 出版社
- Zoe
- 発表時間
- 2024/9/25
概要
自動誘導車両 (AGV) に超音波レーダー衝突回避センサーを統合することは、不可欠な安全機能です。これらのセンサーは超音波技術を利用して周囲の環境をリアルタイムで監視し、障害物との衝突を効果的に回避します。以下では、AGV における超音波レーダー衝突回避センサーの動作原理、利点、および実際の用途について詳しく説明します。
AGV における超音波レーダー衝突回避センサー
自動誘導車両 (AGV) に超音波レーダー衝突回避センサーを統合することは、不可欠な安全機能です。これらのセンサーは超音波技術を利用して周囲の環境をリアルタイムで監視し、障害物との衝突を効果的に回避します。以下では、AGV における超音波レーダー衝突回避センサーの動作原理、利点、および実際の用途について詳しく説明します。
超音波センサーの動作原理
超音波センサーは、高周波音波(通常は人間の可聴範囲を超える)を放射し、周囲の物体から反射された信号を受信することで機能します。センサーは送信機と受信機で構成されます。送信機は超音波を放射し、物体で反射された超音波を受信機が受信します。放射と受信の時間差を測定し、音速(空気中では毎秒約 340 メートル)を使用することで、物体までの距離を計算できます。 (超音波センサーの詳細)
衝突回避システムに超音波センサーを統合する利点
•表面非感受性: 光学センサーとは異なり、超音波センサーは物体の表面の色、光沢、または質感に左右されないため、さまざまな材料を安定して検出できます。
•高い適応性: 超音波センサーは、光学センサーが深刻な影響を受ける可能性のある、ほこり、霧、暗い環境でも良好に機能し続けます。
•コスト効率: 超音波センサーは一般にレーザーセンサーやレーダーセンサーよりも安価であるため、AGV やその他の自動化機器への大規模な導入に適しています。
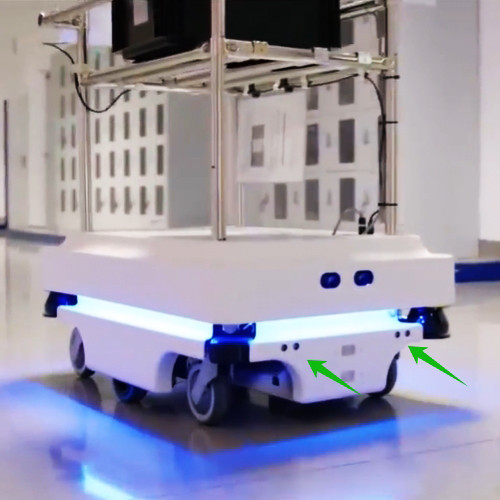
AGVロボットにおける超音波センサーの応用
•前方経路検出: AGV の前面に設置された超音波センサーが、歩行者、他の車両、静止物など、前方経路上の障害物を検出します。事前に設定された安全しきい値内で障害物が検出されると、AGV は警告を発するか、衝突を回避するために自動的に減速/停止します。
•後進経路検出:AGV の後部に取り付けられた超音波センサーが後進時に障害物を検知し、後進時の安全を確保します。
移動機械システムへの超音波センサーの統合
超音波センサーは通常、AGV の制御システムに統合されており、シリアルまたはデジタル I/O インターフェイスを介してメイン制御ユニットと通信します。制御システムは、センサーから返された距離情報と、AGV の現在の位置、速度、および事前に設定された安全ルールと経路計画に基づいて、障害物回避の決定を行います。
推奨超音波センサー

主な特徴
• フルメタルM30取り付けねじ付きスリーブ
• 過酷な環境にも適しています
基本機能
• 1つのNPNまたはPNPスイッチ出力
• 2つのNPNまたはPNPスイッチ出力
• 0~10Vのアナログ電圧出力または4~20mAのアナログ電流出力
• 最新の10リンク出力とデジタルRS485、Modbus-RTU標準プロトコル通信をサポート
• 灰色のワイヤーによる検出距離学習機能
• 標準動作電圧はDC 10~30V
• 温度補正
超音波センサーに関する考慮事項
• 死角の問題: 超音波センサーは、非常に近い距離で死角を検出する場合があります。これらの領域での衝突を避けるために、設計時にこの要素を考慮する必要があります。
• マルチセンサーコラボレーション:検出精度と信頼性を向上させるために、AGVに複数の超音波センサーを設置し、他の種類のセンサー(赤外線、レーザー、レーダーなど)を統合して総合的な判断を行うことができます。
• 環境適応性: 超音波の速度は環境によって変化する可能性があり(温度や湿度の変化など)、補正のために校正やアルゴリズムの調整が必要になります。
関連非接触センサー

出力方式: NPN/PNP+アナログ+RS485 解像度: 1mm レーザータイプ: 赤色半導体レーザー クラスIIレーザー 655+10nm<1m 反応時間: 50-200ms


ビーム間隔: 40mm<br> 光軸数: 72<br> 保護高さ: 2840mm<br> レーザーカーテンセンサー出力 (OSSD)2 PNP

検出範囲: 100〜2000 mm、150〜3000 mm 材質: プラスチックアクセサリ、エポキシ樹脂充填 接続タイプ: 5ピンM12コネクタ