業界知識 | 特殊なシナリオで LiDAR センサーを使用する際の細かい詳細
- シェア
- 発表時間
- 2024/5/29
概要
LiDAR センサー製品には、障害物回避型、ナビゲーション型、ナビゲーションと障害物回避の統合型があり、測定精度が高く、スキャン速度が速く、耐干渉性が強く、小型で軽量、信頼性が高いなどの利点があります。
LiDARセンサーは1960年代に初めて提案された技術です。幅広い用途を持つLiDARは、ここ数年で新たな繁栄と進歩を遂げ、多業界で使用されています。自動運転、ドローン検査、産業オートメーションなどの分野で急速に重要な技術となっています。
現在までに、DADISICKは障害物回避型、ナビゲーション型、ナビゲーションと障害物回避の統合型を含む複数のLiDARセンサーシリーズ製品を発売しており、測定精度が高く、スキャン速度が速く、干渉防止能力が強く、小型で軽量、信頼性が高いなどの利点があり、産業用AGV、移動ロボット、低速ロボットに最適な選択肢です。
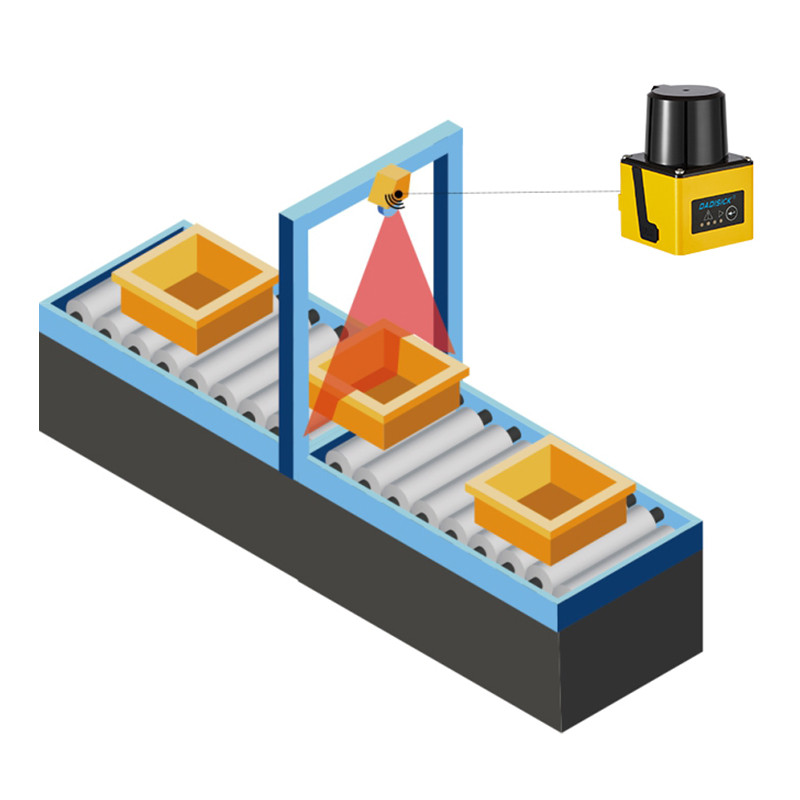
各センサーには、独自のパフォーマンス特性に基づいた独自の適切なアプリケーション シナリオがあります。実際の特殊環境アプリケーションでは、LiDAR にも使用上のヒントがいくつかあります。
LiDARセンサーの動作原理
LiDAR センサーは飛行時間 (TOF) の原理に基づいています。LiDAR はレーザーパルスを放射し、測定対象の表面で反射して戻ってくるまでの時間を測定し、それを距離データに変換します。
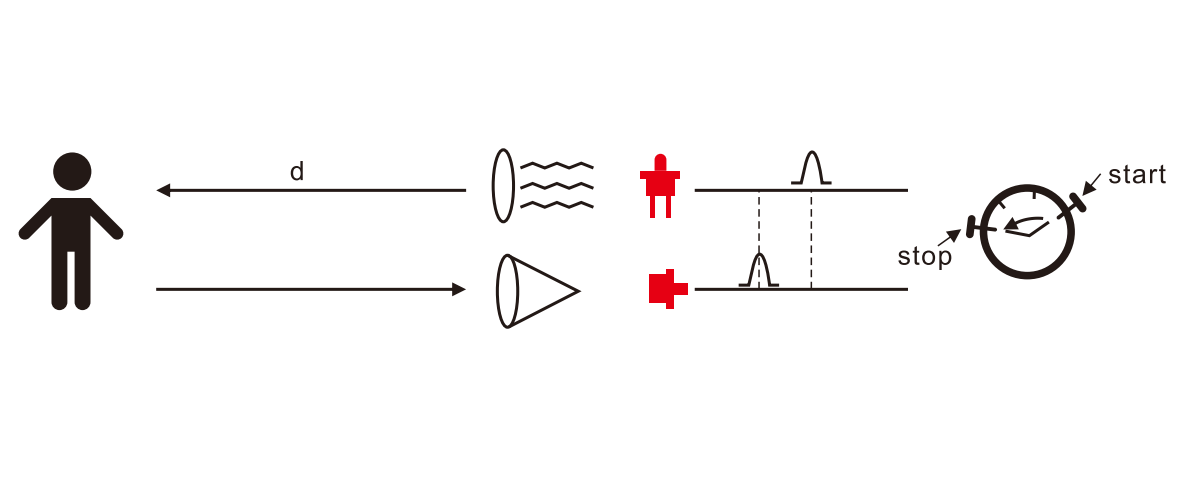
光を発してから光を受け取るまでの時間差はtである。
cは光の速度なので、レーダーとターゲット間の距離は
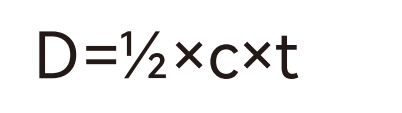
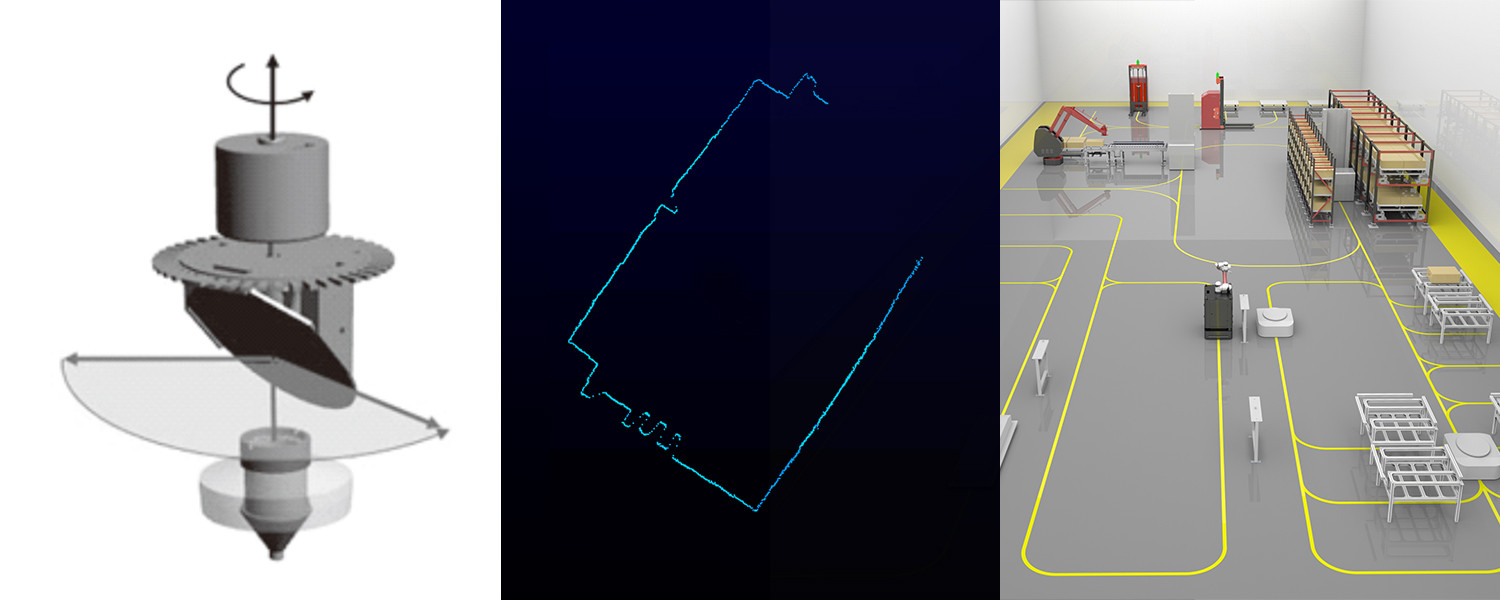
LiDARセンサーは、測距レーザーパルスを反射鏡で反射します。反射鏡がモーターによって回転駆動されると、回転軸に垂直な走査面が形成されます。レーダーは一定時間ごとにパルス光を発し、モーターによって送信ミラーが回転駆動され、2次元の点群データが形成されます。
周囲に透明な媒体がある場合
困難:
周囲環境に透明媒体(きれいな水など)がある場合、透明媒体の内側または背後にあるターゲットを測定できます。透明媒体では光が屈折するため、測定対象は実際には屈折した光路上にあります。一方、測定結果は直線光路上にあるため、測定対象の位置がずれます。また、レーダーは、透明媒体の内側または背後にある実際の対象表面の反射と、完全にきれいではない透明媒体表面の拡散反射の 2 つの反射エコーを受信することもあります。このとき、測定結果は不確実であり、どちらが媒体表面であるか、実際の対象であるかはわかりません。
対策:
実際の使用では、環境内の透明媒体、特に鏡のような表面を持つ媒体は、不安定な測定結果や誤った測定結果を避けるために特別な処理が必要です。具体的な処理方法としては、媒体の表面を拡散半透明にしたり、透明性と反射能力を低下させたり、測定データを処理する際にこれらの位置を遮蔽したりすることが挙げられます。
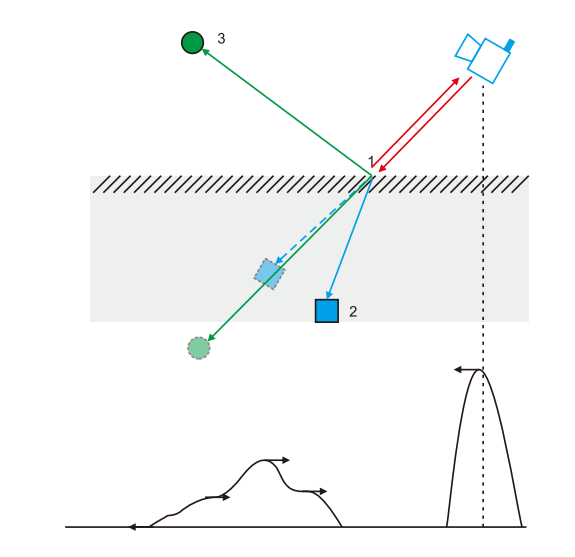
ミラーターゲットを測定する場合

レーダーがミラーターゲットを測定するときは、注意してください! 効果的な測定は、ターゲット表面が入射レーザーに対して垂直である場合にのみ達成できます。レーザーの入射角が垂直でない場合、その拡散反射率は非常に低く、効果的な測定が得られません。実際の測定結果は、図に示すように、ミラー反射光路上のミラーターゲット距離です。
ミラーターゲットへのレーダー投影により全反射が発生し、全反射光がターゲットに投影されます。レーダーによってテストされる実際の距離は、点線枠のターゲットまでの距離です。
LiDARセンサーの実際の範囲について
特定のターゲットに対するレーダーの実際の範囲は、次の要因によって影響を受けます。
1. ターゲット拡散反射率:
ターゲットの拡散反射率は、材質だけでなく表面の向きにも関係します。ターゲットの拡散反射率が高いほど、実際の範囲は長くなります。
2. 反射領域:
レーザースポットがカバーする対象表面の面積。カバーエリアが大きいほど、実際の測定距離は長くなります。
3. 透光カバーの汚れ:
レーダーの光透過カバーが汚れると、光透過率が低下します。光透過率が低下するほど、測定能力が低下します。光透過率が 60% まで低下すると、測定能力がまったく発揮されなくなる可能性があります。
4. 大気の状態:
レーダーの実際の測定能力は、特に屋外で作業する場合、大気の状態によっても影響を受けます。大気の光伝播能力が悪いほど、レーダーの実際の測定能力は低くなります。極端な気象条件(濃霧など)では、測定能力はまったく役に立ちません。
売れ筋商品